When to Use a Semicolon
If you do an internet search for “controversial punctuation marks” (and why not—we’ve all got the time, right?) your results will produce two winners: the Oxford comma and the semicolon.
I’ll leave the Oxford comma debate to others (though my vote is YES!).
As for the semicolon, it generates passionate responses from both its allies and adversaries. Generally speaking, its allies tend to be non-fiction writers, and its adversaries fiction writers. There is a large third cohort, though, who regards the semicolon with fear and avoidance—those who don’t understand how to use it other than to wink at their friends in emails or social media posts. This post is for you, members of the third cohort.
Semicolons: An Overview
A semicolon looks like a period stacked atop a comma, and that appearance conveniently displays its primary use. The semicolon has the power of a period with some of the softness of a comma.
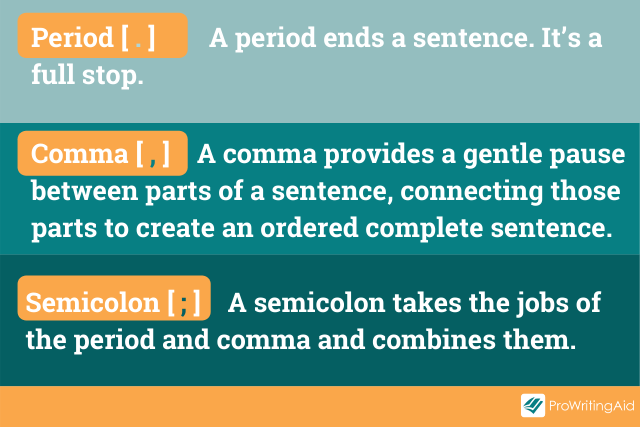
- A period ends a sentence. It’s a full stop.
- A comma provides a gentle pause between parts of a sentence (as long as those parts are not both independent clauses), connecting those parts to create an ordered complete sentence.
- A semicolon takes the jobs of the period and comma and combines them, so to speak; it creates a stop and a connection between independent clauses.
Unlike the comma, it is strong enough to join independent clauses together and control their flow with a stop, but that stop comes with the promise of continuation and without splitting those clauses apart completely.
The semicolon also has other functions—it separates items in serial lists and is useful in avoiding repetition in elliptical constructions. If any of these terms and uses are unfamiliar to you, don’t worry; we’ll go through them one by one.
Semicolons: Both a Stop and Connection Between Independent Clauses
To understand the role of the semicolon with independent clauses, it’s important to understand what an independent clause is.
What Is an Independent Clause?
An independent clause is a complete, simple sentence. A complete sentence has a subject, verb, and complete thought.
An independent clause is “independent” because it can stand on its own as a sentence; it makes grammatical sense all by itself. Almost every sentence in this paragraph about my day at the beach is an independent clause (a simple sentence).
- I went to the beach. The waves were enormous. Sandcastles covered the shoreline. Some of them were big enough to live in. The sun was blazing! The ocean was cold and refreshing. Adults chatted and sipped drinks. Kids ran and screamed happily. They threw frisbees. They splashed each other.
While those sentences are grammatically correct, by the end of the paragraph you were probably bored and wishing I’d just go home already as the rhythm of my sentences was repetitive and dull.
Sentences can contain more than just one subject, verb, and complete thought; they can contain multiple independent clauses as well as dependent clauses and phrases.
That complexity is a good thing, providing sentence variety and style, but only if the punctuation keeps the sentence controlled and clear.
Check out this rewrite of my day at the beach. The independent clauses are bold.
- I went to the beach, and the waves were enormous. Sandcastles covered the shoreline; some were practically big enough to live in. The sun was blazing, but the ocean was cold and refreshing. While adults chatted and sipped drinks in their beach chairs, kids ran and screamed happily, throwing frisbees, and splashing each other.
Hopefully, you found the sentence variety an improvement.
More importantly, did you notice that no two independent clauses are joined using only a comma? Doing that would create an error called a comma splice. Semicolons—carrying the stopping power of a period with a little more subtlety—are a cure for comma splices.
Semicolons as a Cure for the Comma Splice
A comma splice is a type of run-on sentence created when two independent clauses are joined using only a comma. It’s a common error, but also an easy one to correct. One solution is the semicolon.
- Comma splice: I went to the beach, the waves were enormous.
- Correction with a semicolon: I went to the beach; the waves were enormous.
Why is this an error? Because a comma just doesn’t have enough power to connect two independent clauses.
The comma splice may not seem like a problem in a sentence that only includes two independent clauses (though it’s still an error) but with longer sentences, the flow, connection, and logic among ideas can get lost without a stronger stop.
There are two additional ways to correct a comma splice: separate the independent clauses with a period or use a comma + coordinating conjunction combo.
Coordinating conjunctions are words (and, but, or, nor, for, yet, so) that join ideas, words, phrases, or clauses of equal importance.
- Comma splice: I went to the beach, the waves were enormous.
- Correction with a period: I went to the beach. The waves were enormous.
- Correction with a comma + conjunction: I went to the beach, and the waves were enormous.
If you're still confused about the usage of comma splices, ProWritingAid has you covered. Not only do they check for grammatical errors, but you'll get a pop-up box that shows you more information about the rule that was broken. Try the Web Editor today and see for yourself.

Why Use the Semicolon Option?
I think I can safely say that you won’t face a writing situation where you're forced to use a semicolon; you’ve seen the other options. However, having the skill to use one is helpful when :
- You don’t want to split your independent clauses apart completely; the ideas that they present are closely connected, and you want to preserve them as one unit. A period can’t do that.
- The comma and conjunction combo creates problems with style and tone.
For example, if I texted this to my friends (let’s assume we’re caring about punctuation in our texts):
I’d like to have a picnic for I love to eat outside.
I’d get some serious side-eye or laughing emojis in response. The “for” comes across as too formal for a friendly conversation, and in this context, none of the other coordinating conjunctions work.

Even if another coordinating conjunction does fit your context, sometimes you may want to write more concisely; the semicolon can help! For example, in a report or news article about a security breach, you could write
The security breach was widespread, and thousands of clients were affected.
or
The security breach was widespread; thousands of clients were affected.
Both sentences are grammatically sound, but the version with the semicolon is slightly more streamlined than the version with the conjunction.
If your goal isn’t to be concise or streamlined, you can still use a semicolon to achieve sentence variety. Knowing your options will only help your writing.
Details to Remember
- If you use a semicolon instead of the comma + coordinating conjunction option, make sure you leave that conjunction out of the sentence. There is no semicolon + coordinating conjunction option.
- Do not capitalize the word following the semicolon
Semicolons Join Independent Clauses Connected by Conjunctive Adverbs
In case you’re wondering, conjunctive adverbs are like coordinating conjunctions in that they join clauses together.
The adverb specification means they accomplish that joining by establishing a relationship between the clauses regarding time, place, degree, number, cause, etc.
Common examples of conjunctive adverbs include:
| also | indeed | as a result |
|---|---|---|
| additionally | likewise | as a consequence |
| consequently | meanwhile | for example |
| furthermore | nevertheless | on the contrary |
| however | nonetheless | moreover |
| incidentally | therefore | in addition |
When you use a conjunctive adverb to create a link between two independent clauses, put a semicolon before the conjunctive adverb (bolded below) and a comma after it.
I was desperate for a good night’s sleep; however, my infant had other plans.
The students had studied hard for the exam; as a result, they earned impressive scores.
The restaurant was short-staffed tonight; nevertheless, the crew managed to provide customers with an excellent experience.
Enough with the independent clauses! Let’s move on to other times when the semicolon is a friend to your writing.
Semicolons: Effective List Organizers

Semicolons and Serial Lists
Serial lists are lists in which the items listed are complex. Those items already include commas within their descriptions, so using more commas to separate those complex items can create confusion. While serial lists aren’t as dangerous as serial killers, without semicolons, they are crimes against punctuation.
For example, imagine I’m describing flavors at an ice cream store, and I write,
- The delicious flavors included dark, decadent chocolate, rich, creamy peanut butter, and sweetly tart, smooth black raspberry.
Or I’m listing cities I’ve visited (I wish!) and write:
- I’ve traveled to London, England, New York City, United States, Shanghai, China, Paris, France, Perth, Australia, and Manila, Philippines.
Do you see the problem?
Most likely, you were able to untangle the actual flavors from the adjectives describing them and recognize the names of the major cities, but you also probably had to work a little too hard to make those distinctions.
If the lists were about something less familiar than ice cream or included less-known cities, you would have struggled even more. Here, the semicolon restores order to the serial list:
The delicious flavors included dark, decadent chocolate; rich, creamy peanut butter; and sweetly tart, smooth black raspberry.
I’ve traveled to London, England; New York City, United States; Shanghai, China; Paris, France; Perth, Australia; and Manila, Philippines.
If you’re reading really carefully, you likely noticed I added an “and” to the last entry of each list. That conjunction + semicolon combo is permissible in the serial-list context.
Semicolons and Bulleted Lists
A bulleted list is what it sounds like: a list whose items have bullets in front of them. Using semicolons in this type of list is really a matter of personal style; you can choose not to use them, or any other punctuation (some use commas or periods) at the end of each item as the bullets themselves separate each point.
With matters of style, consistency is what’s important. If you have more than one bulleted list in whatever you’re writing, use the same method of punctuation (or non-punctuation) for each.
Here’s an example of a bulleted list that uses semicolons:
Before leaving the vacation rental home, be certain to:
- Load and run the dishwasher;
- Strip linens from the beds;
- Dispose of all trash;
- Do a final check for personal belongings.
The period at the end of the list is intentional as it marks the end of the sentence.
Bonus tip: each item on the list should follow the same grammatical construction.
Semicolons with Elliptical Constructions
The meaning of elliptical construction is not quite as concrete as bulleted list. An elliptical construction is not an oval-shaped building.
Here, the elliptical refers to the punctuation mark the “ellipsis”—a series of three dots used to indicate the omission of a word or words. There are other uses for the ellipses you can investigate here.
In elliptical constructions, semicolons allow you to avoid repeating words unnecessarily. For example, you can streamline this
- My sister loves salted caramel ice cream, and my dad loves chocolate ice cream.
to this
- My sister loves salted caramel ice cream; my dad, chocolate.
And this
- Final counts revealed candidate A earned 51% of the vote, Candidate B earned 30% of the vote, and Candidate C earned 19% of the vote.
to this
- Final counts revealed candidate A earned 51% of the vote; Candidate B, 30%; Candidate C, 19%.
How Is a Colon Different from a Semicolon?
The colon is made up of two dots, which look like two periods stacked atop the other, which differ from the semicolon’s comma-on-a-period appearance. As with the semicolon, the colon’s construction gives a hint as to its function. Think of those stacked periods, the colon, as an emphatic—perhaps even a dramatic—stop between parts of a sentence. Those colons are attention seekers.
Colons as Announcers
Colons announce or introduce or bring attention to the information following them. That information could be:
- items in a list,
Be certain to bring the following items on the hike: extra socks, water, and trail mix.
- a quotation,
Even Abraham Lincoln had feelings about the semicolon. He once said: “But I must say I have a great respect for the semicolon; it's a useful little chap.”
- an example or explanation,
They have delicious side dishes: macaroni and cheese, sautéed vegetables, or rice pilaf.
- or a noun or noun phrase,
I got just what I needed on my vacation: rest and relaxation.
You can also use colons between independent clauses, like the semicolon, when you really want to draw attention to that second independent clause. Perhaps it serves to intensify the meaning of the clause that precedes it or just warrants a little more drama.
- The foliage was breathtaking: the tree-covered hills looked like an autumn-colored rainbow.
Semicolons: A Final Word
Now that you know how to use semicolons properly, you can make informed decisions about how and when they will (or won’t) serve your writing best. Semicolons are great for organizing lists. They also open up style options for your sentences. Just don’t get carried away.
As with most things, moderation is a good rule to follow when using semicolons. If you need any more guidance on the topic, don't worry, ProWritingAid is here to help. Request a free trial today!